
[Paper Review] Generalized Variational Inference: Three arguments for deriving new posteriors
이 포스팅은 Knoblauch, Jewson, Damoulas (2019) 의
“Generalized Variational Inference: Three arguments for deriving new posteriors” 를 읽고 정리한 글입니다.
Introduction
Problem and Proposed Solution
베이지안 추론은 다음과 같은 형태의 posterior 를 사용합니다.
\[q_B^*(\theta \mid x_{1:n}) \propto \pi(\theta)\; p_n(x_{1:n} \mid \theta)\]여기서 $\pi$ 는 prior, $p_n$ 은 likelihood 입니다.
논문 저자들은 이 posterior 를 실제로 사용하기 위해서는 암묵적으로 세 가지 가정이 수반된다고 강조합니다.
- Well-specified prior
- 사전 지식을 잘 반영하는 prior $\pi(\theta)$ 를 알고 있고, 그걸 수학적으로 잘 표기할 수 있다고 가정합니다.
- Well-specified likelihood model
- 실제 데이터의 분포가 $p_n(x_{1:n}\mid \theta)$ 꼴이라고 믿습니다. (모델이 참이라고 가정)
- Infinite computing power
- 일반적으로 intractable 한 posterior $q_B^*(\theta)$ 를 정확하게 다룰 수 있다고 봅니다.
</br>
작거나 전통적인 통계 task 에서는 이 세 가지 가정이 그럭저럭 성립할 수 있지만,
데이터 및 모델의 규모가 커질수록 현실과의 간극이 커집니다.
- prior 는 사실상 “fake” 인 경우가 많습니다.
- likelihood 는 misspecification, heavy tails, contamination 이 흔합니다.
- posterior 는 너무 커서 MCMC, standard VI 로도 다루기 힘든 경우가 많습니다.
</br>
따라서 저자들은 아예 Bayes rule 을 최적화 문제로 재해석하고,
그 틀을 일반화하여 “새로운 posterior” 를 설계하자고 제안합니다.
그 결과물이 바로
- Rule of Three (RoT) : 3개의 argument 로 정의되는 generalized posterior
- GVI (Generalized Variational Inference) : RoT 의 tractable 한 특수 케이스
입니다.
Method 1
Bayes의 Multiplicative Form
먼저 generalized Bayesian posterior 를 다음과 같이 씁니다.
\[q_B^*(\theta) \propto \pi(\theta)\prod_{i=1}^n \exp\{-\ell(\theta, x_i)\}.\]- Standard Bayes 인 경우
$\ell(\theta, x_i) = -\log p(x_i \mid \theta)$ 입니다. - Generalized Bayes 인 경우
$\ell$ 은 임의의 loss function 입니다. (예: median 추론이면 $|\theta - x_i|$)
이 multiplicative form 은 loss 를 quasi-likelihood 로 보는 관점에서도 해석할 수 있습니다.
(예: Bissiri et al. 의 generalized Bayes)
Bayes Posterior는 무한 차원에서의 최적화 문제
Csiszár (1975) 와
Donsker & Varadhan (1975) 에 따르면,
Bayes posterior 는 다음과 같은 무한 차원 최적화 문제의 해로 쓸 수 있습니다.
- $\mathcal P(\Theta)$ : $\Theta$ 위의 모든 확률분포들의 집합
- 첫 항 : 데이터에 대한 loss 의 기댓값
- 둘째 항 : prior 와의 KLD regularization
즉,
Bayes posterior 는
“loss + KLD” 를 최소화하는 무한 차원 최적화 문제의 해입니다.
이것이 논문에서 계속 끌고 가는 핵심 isomorphism 입니다.
Optimality of Standard VI
Exact posterior 는 계산 cost 가 크기 때문에,
posterior 후보를 어떤 variational family
$\mathcal Q = { q(\theta \mid \kappa) : \kappa \in K }$ 로 제한합니다.
그러면 최적화 문제는 다음과 같이 바뀝니다.
\[q_{\mathrm{VI}}^* = \arg\min_{q\in \mathcal Q} \bigg\{ \mathbb{E}_q\bigg[\sum_{i=1}^n \ell(\theta, x_i)\bigg] + \mathrm{KL}(q \,\|\, \pi) \bigg\}\]이 식은 우리가 알고 있는 standard VI 의 objective (ELBO 최대화와 동치) 와 동일합니다.
즉, standard VI 는
variational family $\mathcal Q$ 가 고정된 상황에서
Bayes optimization 문제의 “제한된 최적해”입니다.
같은 $\mathcal Q$ 를 사용하면서 다른 divergence 를 최적화하는 VI 들(α-VI, Rényi-VI 등)은
이 base optimization 문제를 그대로 계승하지 않기 때문에,
저자들은 이를 “Bayesian optimality 관점에서 suboptimal 하다”라고 봅니다.
Method 2: Rule of Three (RoT)
RoT: 세 개의 argument 로 정의되는 generalized posterior
앞의 isomorphism 을 보고 나면 자연스럽게 다음과 같은 생각을 할 수 있습니다.
“그렇다면 loss, divergence, feasible set 을 바꾸면
새로운 posterior 들을 통일된 방식으로 정의할 수 있지 않을까?”
이 생각을 공식화한 것이 Rule of Three (RoT) 입니다.
수식으로 쓰면 다음과 같습니다.
\[q^*(\theta) = \arg\min_{q\in \Pi} \bigg\{ \mathbb{E}_q\bigg[\sum_{i=1}^n \ell(\theta, x_i)\bigg] + D(q \,\|\, \pi) \bigg\} \;\;\overset{\text{def}}{=}\;\; P(\ell, D, \Pi)\]여기서 세 가지 argument 는 다음과 같습니다.
- Loss $\ell(\theta, x)$
- 반드시 $-\log p(x\mid\theta)$ 일 필요는 없습니다.
-
예: median 추론이면 absolute error $ \theta - x $, robust loss, scoring rule 등입니다.
- Divergence $D(q \,|\, \pi)$
- prior 와 posterior 사이의 distance 입니다.
- Standard Bayes 에서는 $D = \mathrm{KL}$ 입니다.
- 대신 Rényi divergence, β-divergence 등 다른 divergence 도 사용할 수 있습니다.
- Feasible set $\Pi \subset \mathcal P(\Theta)$
- posterior 후보 분포들의 집합입니다.
- $\Pi = \mathcal P(\Theta)$ 이면 “full” generalized Bayes 입니다.
- $\Pi = \mathcal Q$ 이면 variational inference 가 됩니다.
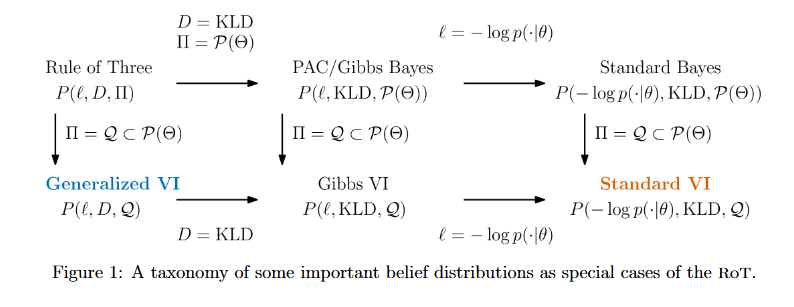
이 RoT 안에서 여러 방법들을 special case 로 볼 수 있습니다.
- Standard Bayes
- $\ell = -\log \text{Likelihood}$
- $D = \mathrm{KL}$
- $\Pi = \mathcal P(\Theta)$
- Standard VI
- $\ell = -\log \text{Likelihood}$
- $D = \mathrm{KL}$
- $\Pi = \mathcal Q$ (variational family)
- Generalized Bayes
- $\ell$ 또는 $D$ 를 수정하고, $\Pi$ 는 전체 공간으로 유지합니다.
Axioms
RoT 가 만족해야 할 세 가지 공리(Axioms) 가 있습니다 (논문 4.1절).
대략적으로 정리하면 다음과 같습니다.
- Coherence / Consistency
- loss 와 divergence 를 어떻게 조합해야
“일관된 belief 업데이트” 가 되는지에 대한 조건입니다.
- loss 와 divergence 를 어떻게 조합해야
- Modular decomposition
- loss 는 goodness of fit (어떤 $\theta$ 가 좋은지),
- divergence 는 belief regularization (prior 대비 얼마나 멀어질 수 있는지)
를 담당해야 합니다. - divergence 를 바꿀 때, loss 의 의미를 훼손하면 안 됩니다.
- Invariance / Reparameterization 등 기술적 조건
- reparametrization 에 대해 잘 작동하는지,
- 적절한 regularity / measurability 등을 만족하는지에 대한 조건입니다.
저자들은 이 공리들을 만족하는 generalized posterior 는 RoT 형태로 표현될 수 있다고 주장합니다.
즉, RoT 는 “합리적인 generalized Bayesian 업데이트” 들을 하나의 형태로 묶는 프레임워크라고 볼 수 있습니다.
Method 3: Generalized Variational Inference (GVI)
이제 RoT 는 정의되었지만, 여전히 $\Pi = \mathcal P(\Theta)$ 로 두면 계산 cost 가 매우 크게 됩니다.
그래서 tractable 한 special case 로서 GVI 를 정의합니다.
\[\Pi = \mathcal Q = \{q(\theta \mid \kappa) : \kappa \in K\} \subset \mathcal P(\Theta)\]를 variational family 로 잡아서 RoT 를 푸는 것을 GVI 라고 부릅니다.
즉, GVI 의 objective 는 다음과 같습니다.
\[q_{\mathrm{GVI}}^* = \argmin_{q \in \mathcal Q} \bigg\{ \mathbb{E}_q\bigg[\sum_{i=1}^n \ell(\theta, x_i)\bigg] + D(q \,\|\, \pi) \bigg\}\]- $\ell$ : 원하는 loss (NLL, robust loss, scoring rule, pseudo-likelihood 등)
- $D$ : 원하는 divergence (KL, Rényi, β-divergence 등)
- $\mathcal Q$ : mean-field Gaussian, normalizing flow, BNN 등 variational family
GVI 는 RoT 의 특수 케이스이기 때문에 Axiom 1, 2, 3 을 모두 만족합니다.
이로부터 다음과 같은 해석이 가능합니다.
- Loss $\ell$ 은 어떤 $\theta$ 가 좋은가를 결정하는 역할,
- Divergence $D$ 는 prior 대비 posterior 가 얼마나 멀어질 수 있는가를 규제하는 역할을 합니다.
따라서 두 요소를 분리해서 조절할 수 있습니다.
- $\ell$ 을 바꾸면 “best parameter” 의 선택 기준이 바뀌고,
- $D$ 를 바꾸면 uncertainty quantification 의 크기/모양만 바뀌는 식입니다.
GVI vs DVI (Discrepancy VI)
최근 VI 문헌에서는, posterior 와의 KL 대신 다른 divergence (또는 discrepancy) 를 쓰는 방식들이 많이 제안됩니다.
- Rényi-α divergence 기반 VI
- χ²-divergence 기반 VI
- Wasserstein distance 기반 VI
- 기타 f-divergence 기반 VI 등
논문에서는 이런 계열을 통칭해 Discrepancy Variational Inference (DVI) 라고 부르며,
RoT/GVI 관점에서 다음과 같이 비판합니다.
- 같은 $\mathcal Q$ 를 쓰면서 posterior 와의 divergence 를 바꾸는 것은 Bayesian 의미에서 suboptimal입니다.
- Bayes-as-optimization 관점에서 base 문제는 이미
\(\min_q \big\{\mathbb E_q[\ell] + \mathrm{KL}(q\|\pi)\big\}\) 로 정해져 있습니다. - variational family $\mathcal Q$ 로 제한하면,
이 문제의 최적해는 KL 기반 VI 하나뿐입니다. - posterior 와의 다른 divergence 를 직접 줄이는 DVI 는
이 base optimization 의 “제한된 해” 가 아니므로,
이러한 의미에서 Bayesian optimality 를 잃는다고 주장합니다.
- Bayes-as-optimization 관점에서 base 문제는 이미
- Modularity 가 깨집니다.
- GVI (RoT) 에서는
- $\ell$ 이 “어떤 $\theta$ 가 좋은가” 를
- $D$ 가 “prior 대비 얼마나 멀어질 수 있는가 / dispersion” 을
담당하도록 설계되어 있습니다.
- 따라서 divergence 를 바꾸더라도, 이상적으로 argmin 위치(최선의 $\theta$) 는
loss 가 결정하고 유지되며, $D$ 는 “그 주변에 mass 를 얼마나/어떻게 둘지” 만 조정해야 합니다. - 반면 DVI 는 posterior 와의 divergence 를 직접 최적화하기 때문에,
divergence 를 바꾸는 순간 최적점 위치 자체까지 같이 움직여 버릴 수 있습니다.
→ loss 역할과 regularization 역할이 뒤엉기게 됩니다.
- GVI (RoT) 에서는
- 실제 예시: Bimodal mixture 에서의 비직관적 posterior
- 논문은 simple bimodal Gaussian mixture 예시에서
- standard VI (KL, mean-field) 와
- 여러 DVI (다른 discrepancy) 를 비교합니다.
- 일부 discrepancy 는
- 두 모드 사이의 어중간한 곳에 mass 를 두거나,
- 한 모드만 과도하게 살리는 등, 직관적인 “좋은 parameter” 와는 동떨어진 posterior 를 만듭니다.
- 저자들의 메시지는 다음과 같습니다.
단순히 divergence 를 바꾸는 것만으로
항상 “좋은 approximate posterior” 를 얻을 수 있다고 믿는 것은 위험하다.
- 논문은 simple bimodal Gaussian mixture 예시에서
이에 반해 GVI 는 RoT/axioms 를 따르기 때문에
- $\ell$ 과 $D$ 의 역할이 명확히 분리되고 (modular),
- $D$ 를 바꾸더라도 “최선의 $\theta$” 는 동일하게 유지한 채,
- 불확실성의 크기와 모양만 조정하는 것이 가능하다고 주장합니다.
Black-box GVI (BBGVI)
실제 계산 관점에서 보면, GVI objective 는
\[\mathcal J(q) = \mathbb E_q\bigg[\sum_{i=1}^n \ell(\theta, x_i)\bigg] + D(q \,\|\, \pi)\]이며, 우리는 $q(\theta)$ 를 어떤 파라미터 $\kappa$ 를 가진 분포 $q_\kappa(\theta)$ 로 표현합니다.
대부분의 경우 위 기대값과 regularization 항은 analytic 하지 않기 때문에,
논문에서는 Black-box GVI (BBGVI) 라는 이름으로 일반적인 최적화 스킴을 제안합니다.
아이디어는 standard black-box VI 와 거의 동일합니다.
- Variational family 파라미터화
- $q_\kappa(\theta)$ 의 예시:
- Mean-field Gaussian: $\kappa = (\mu, \log \sigma)$
- Normalizing flow: base Gaussian + invertible transform
- BNN: 네트워크 weight 에 대한 factorized Gaussian 등
- $q_\kappa(\theta)$ 의 예시:
- Reparameterization / 샘플링
- 고정된 noise $\epsilon \sim p(\epsilon)$ 를 샘플링하고,
- $\theta = g(\epsilon; \kappa)$ 로 변환하여 $\theta \sim q_\kappa$ 를 구현합니다.
- Monte Carlo 로 objective 및 gradient 근사
- 샘플 ${\theta^{(s)}}$ 에 대해
$$
\widehat{\mathcal J}(\kappa)
=
\frac{1}{S}\sum_{s=1}^S
\bigg[
\sum_{i=1}^n \ell(\theta^{(s)}, x_i)
\bigg]
- \widehat{D}(q_\kappa \,|\, \pi) $$
- $D$ 역시 analytic form 이 없으면 Monte Carlo / score function / reparam gradient 등으로 근사합니다.
- reparameterization trick 덕분에
$\nabla_\kappa \widehat{\mathcal J}(\kappa)$ 는 backprop 으로 계산할 수 있습니다.
- 샘플 ${\theta^{(s)}}$ 에 대해
$$
\widehat{\mathcal J}(\kappa)
=
\frac{1}{S}\sum_{s=1}^S
\bigg[
\sum_{i=1}^n \ell(\theta^{(s)}, x_i)
\bigg]
- Stochastic optimization
- 미니배치 $x_{1:m}$ 을 사용하면 SVI 스타일로 확장할 수 있습니다.
- Adam / SGD 등을 사용해
$\kappa \leftarrow \kappa - \eta \nabla_\kappa \widehat{\mathcal J}(\kappa)$ 로 업데이트합니다.
Standard VI (ELBO, NLL + KL) 도 이 틀의 특수 케이스이므로,
기존 black-box VI 코드가 있다면 loss $\ell$ 과 divergence $D$ 만 바꾸어 GVI 실험을 수행할 수 있다는 점을 강조합니다.
Applications: BNN, Deep GP 에서의 GVI
논문 후반부에서는 GVI 를 실제 모델에 적용한 실험을 보여줍니다. (간단 요약)
- Bayesian Neural Networks (BNN)
- Standard VI (NLL + KL, mean-field) 와
GVI (robust loss / tempered divergence 등) 를 비교합니다. - heavy-tailed noise, outlier 가 많은 상황에서
- standard VI 는 overconfident / miscalibrated posterior 를 생성하는 반면,
- GVI 는 분산을 더 적절히 키우고, 예측 calibration 이 개선되는 모습을 보입니다.
- Standard VI (NLL + KL, mean-field) 와
- Deep Gaussian Processes (Deep GP)
- generalized loss + divergence 를 넣은 GVI 를 적용합니다.
- Noise / model misspecification 세팅에서
GVI 가 standard VI 보다 더 robust 한 predictive performance 를 보인다고 보고합니다.
이 실험들은 “loss 와 divergence 라는 두 개의 다이얼을 돌려서,
Bayesian 추론의 robustness / calibration / misspecification 대응력을 조절할 수 있다”는 주장의 정성적 근거로 등장합니다.
Discussion & Takeaways
마지막으로, 이 논문을 정리하면 다음과 같습니다.
- Bayes 를 “최적화 문제”로 이해하자.
- Bayes posterior 는 \(\min_q \big\{ \mathbb E_q[\text{loss}] + \mathrm{KL}(q \,\|\, \pi) \big\}\) 라는 무한 차원 최적화 문제의 해입니다.
- 이 관점은 VI, EM, generalized Bayes, PVI 등을 한 프레임에서 비교·확장하는 데 매우 유용합니다.
- Standard VI(KL + ELBO) 는, 주어진 family 안에서는 “정석”이다.
- Variational family $\mathcal Q$ 가 고정되어 있을 때,
KL 기반 VI 는 Bayes-as-optimization 을 $\mathcal Q$ 로 제한한 문제의 최적해입니다. - 같은 $\mathcal Q$ 에서 다른 divergence 기반 VI(DVI)를 사용할 경우,
Bayesian optimality 관점에서 “왜 그것이 자연스러운 선택인지”를 추가로 설명해야 합니다.
- Variational family $\mathcal Q$ 가 고정되어 있을 때,
- RoT: 세 개의 다이얼로 posterior 를 디자인하는 프레임워크
- Loss $\ell$ : 어떤 파라미터가 좋은지 (fit / scoring rule)
- Divergence $D$ : prior 대비 얼마나 멀어질 수 있는지, 불확실성의 크기/모양
- Feasible set $\Pi$ : 계산·표현 측면에서의 제약 (full, variational, flow, …)
→ 이 세 가지를 동시에 튜닝하면서 “새로운 posterior” 를 설계하는 통일된 언어를 제공합니다.
- GVI: RoT 를 실제로 쓰기 위한 variational 버전
- $\Pi = \mathcal Q$ 로 제한하여 tractable 하게 만들고,
- Black-box 최적화(SVI, reparam, MC gradient) 를 사용해 구현할 수 있습니다.
- RoT 의 공리를 계승하므로, loss 와 regularizer 의 역할이 modular 하게 유지된다는 장점이 있습니다.
- PVI / scoring-rule 기반 VI 와의 연결
- 우리가 관심 있는 Predictive Variational Inference (PVI) 는
RoT/GVI 에서 보면 “loss $\ell$ 을 log-score 대신 다른 proper scoring rule 로 바꾸는 조합”으로 자연스럽게 해석할 수 있습니다. - 즉, 이 논문은 PVI 를
“Bayes-as-optimization 의 한 generalization” 으로 어디에 위치시킬지 설명해 주는 이론적 배경이 됩니다.
- 우리가 관심 있는 Predictive Variational Inference (PVI) 는
댓글남기기